MIMOSA3
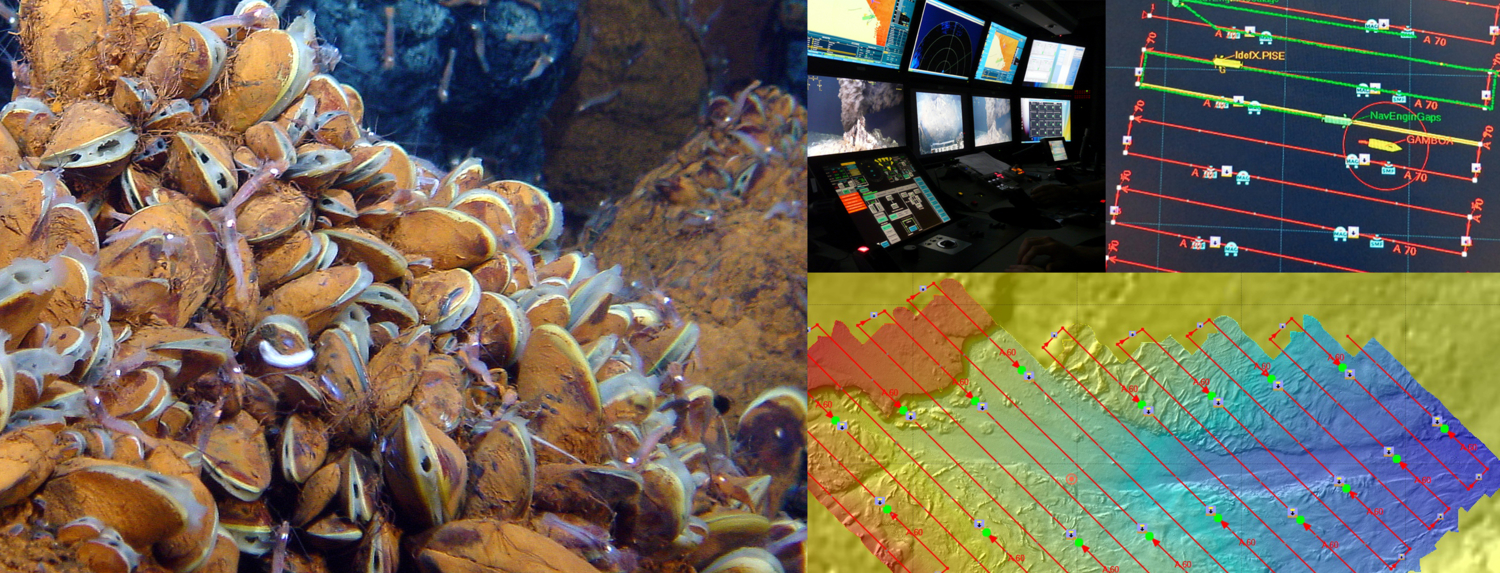
MIMOSA3 est le logiciel opérationnel de nouvelle génération pour la gestion de plongée et programmation de missions pour les engins sous-marins de l’Ifremer (AUVs AsterX / IdefX / CORAL, ROV Victor 6000, HROV Ariane, HOV Nautile).
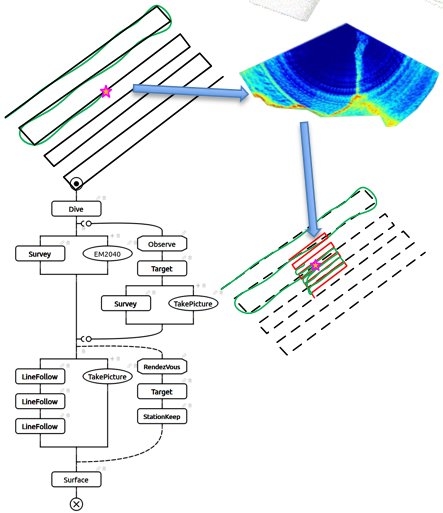
Cet outil permet la préparation, la planification, la supervision, la visualisation et le stockage des données de plongées et le reporting de missions autonomes de tout type d’engin sous-marin. Il est adapté en particulier à la programmation des missions de plongées autonomes et introduit un nouveau concept pour implémenter des stratégies intelligentes d’exploration.
MIMOSA3 est utilisé de façon collaborative via une interface web par les opérateurs de l’engin (dans le poste de pilotage) et par les scientifiques qui conduisent ou observent la plongée (dans le poste de pilotage, à bord du navire, ou à terre).